Stimuli are defined both structurally, in terms of their form, and functionally, in terms of their effects on behavior. A commonly studied type of stimulus in behavior analysis is a discriminative stimulus, an SD, or, as it is spoken, “ess-dee.” A discriminative stimulus sets the occasion for a response to be reinforced, at least intermittently.
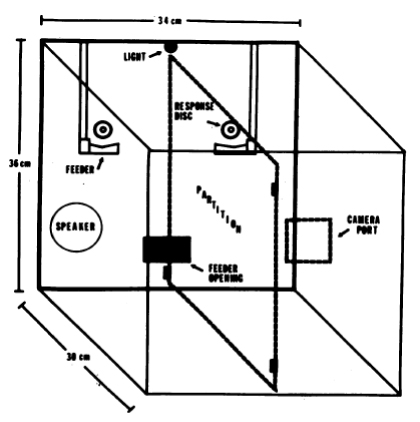 The types of events used in the laboratory as discriminative stimuli are most often lights and sounds. Lights and sounds can be arranged in a variety of configurations and combinations, limited only by the availability of apparatus to present and control these stimuli. Lights and sounds, of course, are by no means the only types of stimuli used and studied. An example of the variety of events that have been studied as stimuli is by an experiment conducted by Millard (1979). Millard used the environment shown in the diagram below. A pigeon was placed on either side of a clear plastic partition such that they could see one another, but physical contact was not possible. The response key of the model pigeon was shielded such that the observer pigeon could see the model but not the key. When the model pigeon’s key was red, rapid key pecking was reinforced and when it was green, the absence of key pecking was reinforced. The observer pigeon’s key was always white. However, two conditions were in effect. When the model’s key was one color, pecking by the observer was reinforced and when it was the other color, pecking was not reinforced (extinction). Remember that the observer pigeon could not see the color of the model’s key. Thus, the only stimulus reliably correlated with reinforcement or its absence was the behavior of the model. Under these conditions, the observer learned when to peck to the key and when not to peck because the pecking would not be reinforced. Thus, the model’s pecking or its absence was the stimulus controlling the observer’s pecking.
The types of events used in the laboratory as discriminative stimuli are most often lights and sounds. Lights and sounds can be arranged in a variety of configurations and combinations, limited only by the availability of apparatus to present and control these stimuli. Lights and sounds, of course, are by no means the only types of stimuli used and studied. An example of the variety of events that have been studied as stimuli is by an experiment conducted by Millard (1979). Millard used the environment shown in the diagram below. A pigeon was placed on either side of a clear plastic partition such that they could see one another, but physical contact was not possible. The response key of the model pigeon was shielded such that the observer pigeon could see the model but not the key. When the model pigeon’s key was red, rapid key pecking was reinforced and when it was green, the absence of key pecking was reinforced. The observer pigeon’s key was always white. However, two conditions were in effect. When the model’s key was one color, pecking by the observer was reinforced and when it was the other color, pecking was not reinforced (extinction). Remember that the observer pigeon could not see the color of the model’s key. Thus, the only stimulus reliably correlated with reinforcement or its absence was the behavior of the model. Under these conditions, the observer learned when to peck to the key and when not to peck because the pecking would not be reinforced. Thus, the model’s pecking or its absence was the stimulus controlling the observer’s pecking.
The apparatus in this room was designed to present stimuli that, through their correlation with different circumstances of reinforcement, come to control operant behavior. Some of the devices are for presenting simple lights and sounds, but others, like teaching machines, present very complex verbal stimuli. These verbal stimuli come to control verbal responding in principle in much the same way that the simpler lights and sounds come to control lever pressing and key pecking of rats and pigeons, respectively.
TEACHING MACHINES
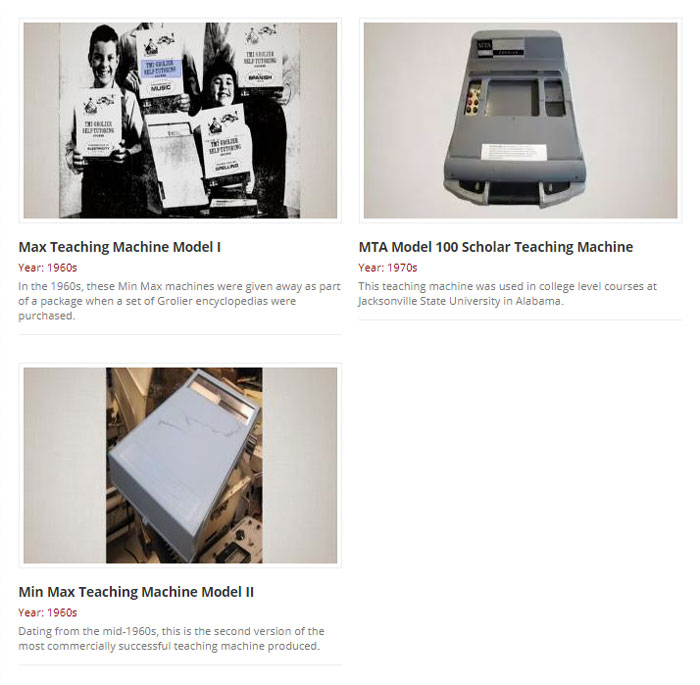
Teaching machines have been around since the 1920s (for a review see Benjamin [1988]), but they achieved their most sophisticated development under Skinner (Skinner’s early teaching machines). These devices today would be classified as assistive technology devices, like the self-help devices in the Self-Management display. The method of learning through the use of material presented through a teaching machine was labeled programmed instruction.
The teaching machine was only a hunk of metal or plastic. The heart of the teaching machine was the program that delivered the material to be taught. The basic idea of teaching machines, derived from Skinner’s ideas about learning, was to break material down in such a way that learning could be shaped without, or with minimal, errors, while progressing through a series of successive approximations to more and more complicated material. The teaching machine gradually gave way to the digital computer as the programming device, but the organization and development of the material to be taught remains the key to instructional design. Good instructional designers still follow the principles set out by the 1950s and 60s generation of instructional designers in creating software that relies on the principles of differential reinforcement of successive approximations (shaping), immediate reinforcement, and step-by-step mastery of material. Each of the teaching machines shown in this display were means of presenting material arranged according to these principles to result in an end product of more effective learning and improved mastery of the subject at hand. Teaching through programmed instruction was one of two teaching methods that developed out of Skinner’s ideas about learning. The other was Personalized Self-Instruction, or PSI. Learn more about PSI.
Skinner's Early Teaching Machines (1950-1960)
 A teaching machine is a self-controlling device that presents a unit of information, provides means for the learner to respond to the information, and provides feedback about the correctness of the learner’s responses.
A teaching machine is a self-controlling device that presents a unit of information, provides means for the learner to respond to the information, and provides feedback about the correctness of the learner’s responses.
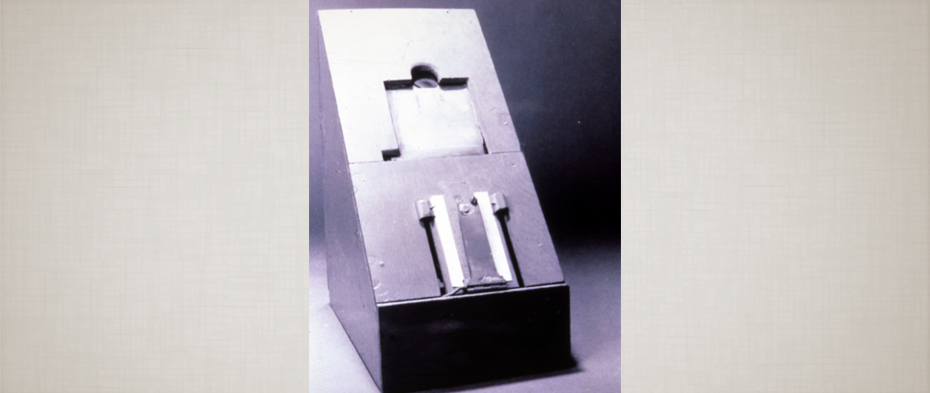
B. F. Skinner may not have invented the teaching machine (its origins are murky, as psychologist Ludy Benjamin notes in his 1988 history of the teaching machine), but it reached its apogee under his intellectual leadership. Benjamin defined a teaching machine as “an automatic or self-controlling device that (a) presents a unit of information …, (b) provides some means for the learner to respond to the information, and (c) provides feedback about the correctness of the learner’s responses” (1988, p. 704). Skinner’s first device to meet Benjamin’s criteria was constructed in the early 1950s and is shown in Figure 1. Like much of Skinner’s early apparatus, it is obviously home-made and simple in design and construction.
The material to be learned (with this machine it was math problems), printed on a roll of paper that is wound across the window, is presented one item at a time in the upper window. The lower window provides the answer after the learner solves the problem. According to his daughter Julie Vargas “Skinner's first teaching machine simply presented problems in random order for students to do, with feedback after each one. But this machine did not teach new behavior. All it did was give more practice on skills already learned. Within three years, however, Skinner developed programmed instruction, where through careful sequencing, students responded to material broken into small steps” (A brief biography of B. F. Skinner).
During the 1950s, Skinner taught an undergraduate course at Harvard in which he used his perhaps most famous academic book, Science and Human Behavior. In that course he also used a teaching machine of the sort shown below. One of these same machines is part of the Smithsonian Museum’s permanent collection of items from Skinner. The programmed material for use in the teaching machine shown above was arranged on a scroll of paper, as were the programs for most of the subsequent machines shown in this room of the museum. The material for this machine, by contrast, was arranged on a disc, much like the disc that one would see on an old record player.
 Both the hardware and software of teaching machines evolved throughout the 1950s and 1960s. The teaching machines themselves – the hardware - were never very complicated, but the material to be taught – the “software” – was. In principle, the teaching machine and its programs are an extension of Skinner’s early lessons in response shaping: break the behavior down into learnable chunks and teach each chunk in turn (see Peterson [2004] for a nice history of response shaping). It was, and is, no small trick to break down material to be learned into appropriately small steps and then design programs to teach and integrate these steps such that learning occurs. Remember, too, that the programs for teaching machines were created in an era before we had computers, so every step had to be written or printed in such a way that it could be fed into the teaching machine for presentation to the learner. A simple program for teaching basic spelling skills could run several hundred pages (see the TMI spelling program on display in this room). In 1962, James Holland and Skinner published the first textbook designed to teach in a programmed- instructional format. The topic was, not surprisingly, the analysis of behavior (Holland & Skinner, 1962).
Both the hardware and software of teaching machines evolved throughout the 1950s and 1960s. The teaching machines themselves – the hardware - were never very complicated, but the material to be taught – the “software” – was. In principle, the teaching machine and its programs are an extension of Skinner’s early lessons in response shaping: break the behavior down into learnable chunks and teach each chunk in turn (see Peterson [2004] for a nice history of response shaping). It was, and is, no small trick to break down material to be learned into appropriately small steps and then design programs to teach and integrate these steps such that learning occurs. Remember, too, that the programs for teaching machines were created in an era before we had computers, so every step had to be written or printed in such a way that it could be fed into the teaching machine for presentation to the learner. A simple program for teaching basic spelling skills could run several hundred pages (see the TMI spelling program on display in this room). In 1962, James Holland and Skinner published the first textbook designed to teach in a programmed- instructional format. The topic was, not surprisingly, the analysis of behavior (Holland & Skinner, 1962).
The publication of a programmed textbook raises again the important point made in the introductory material to this room: the critical feature of the teaching machine was how the material to be learned was programmed. To get an idea of how complex it can be, try developing a step-by-step procedure for multiplying two six-digit numbers. … … … Finished? Now try developing an entire course in neuroanatomy using a programmed instruction format. Harder yet, eh? Take a peek at: Sidman’s Neuroanatomy.
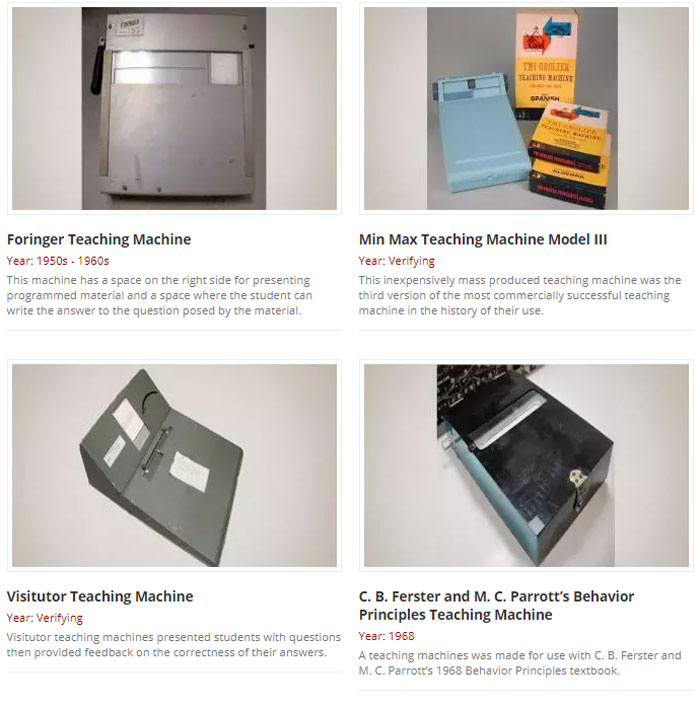
Individual Teaching Machines
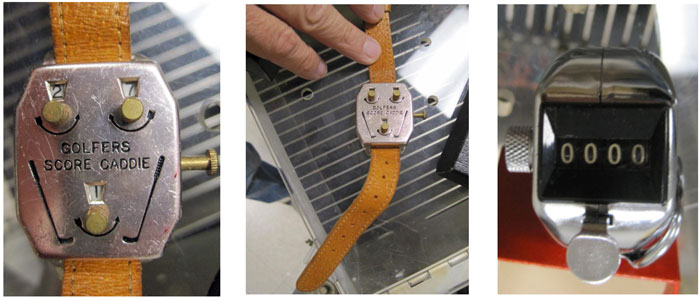
Portable Counting Devices (1960s)
These devices all have in common their portability: they all can be carried or worn. They have been used to record the wearer/carrier’s own behavior and the behavior of others.

Bead Wrist Counter – Designed to be worn on the wrist, this device works on the principle of an abacus. Twelve rows of beads are divided visually into four sets of three each, allowing the separate recording of four different responses. Each row contains nine beads, so that within each set of three rows it is possible to record 900 events. This particular wrist counter was used for self-monitoring, as the four bead sets are labeled “Happys,” “Mild Pleasants,” “Minor Irritations” and “Pissoffs.” Wrist counters like this one were manufactured in sheltered workshops, not surprisingly often under the direction of behavior analysts.
Golf Counters - The humble mechanical golf counter proved an inexpensive and highly portable means of recording behavior. Their use in behavioral research and intervention was described in an early article in the Journal of Applied Behavior Analysis by Ogden Lindsley. In the early days of behavior analysis, it was not unusual to see behavior analysts wearing more than one of these! Although electronic and thereafter digital technology (for an early app designed for data recording click here) has replaced their use in many settings, an occasional behavior analyst still can be found wearing a wrist counter to monitor her behavior or the behavior of her clients.
Hand-Held Digital Counter – This sturdy hand-held version of an electromechanical counter allows recording of up to 9,999 events, far more than a single golf counter. Each depression of the tab at the bottom of the counter advanced the digital display. A barely visible ring on the right side could be placed around the finger to secure the counter.
References
Benjamin, L. T., Jr. (1988). A history of teaching machines. American Psychologist, 43, 703–712.
Escobar, R., & Lattal, K. A. (2011). Observing Ben Wyckoff: From basic research to programmed instruction and social Issues. The Behavior Analyst, 34, 149-170.
Holland, J. G., Skinner, B. F. (1962). The analysis of behavior.
Peterson, G. (2004). Journal of the Experimental Analysis of Behavior.
Vargas, J. S. (2005). A brief biography of B. F. Skinner.
